
目录
项目概述
VirtualOffshore是一个面向海洋石油平台的机器人自主巡检仿真系统,旨在为特种机器人在复杂海洋环境下的智能化评估与开发提供支持。该框架解决了在真实海上平台上开发和训练机器人成本高、风险大的问题。
核心创新
- 高保真仿真环境:基于Unity构建,包含精细的海上设施、设备及交互对象。
- LLM智能体集成:利用LLM增强机器人的感知、决策和交互能力。
- 多类型任务支持:支持巡检、操作、运输及复杂的复合任务。
- 多样化基线模型:提供了从随机到全图信息(Global)等多种基线模型进行性能评估。
研究意义
- 降低门槛:提供安全、低成本的虚拟实验空间。
- 长时程规划:验证了智能体在长序列工业任务中的推理能力。
- 环境交互:支持物理级交互(如开关阀门、按按钮),而非简单的导航。
👨💻 角色
第一作者
负责仿真框架VirtualOffshore的设计与实现、LLM智能体算法开发、实验设计及论文撰写。
🌊 研究背景
海洋石油平台的挑战
海洋油气平台是高度复杂的工业环境,具有以下特点:
- 环境特殊:布局复杂,设备繁多(阀门、管道、仪表)。
- 操作要求高:需要精细的操作能力和长序列的任务规划。
- 开发痛点:在真实平台上进行机器人测试既昂贵又充满安全隐患,且现有的家居环境仿真(如VirtualHome)无法满足工业场景需求。
🎯 研究目标
-
构建专业的海上仿真环境:
- 真实还原海上平台的物理属性(重力、碰撞)和视觉效果。
- 提供丰富的交互对象(Interactive Objects)。
-
评估LLM在工业场景的潜力:
- 探究大语言模型在缺乏演示(Zero-shot)或少量演示(Few-shot)情况下的规划能力。
- 对比不同环境感知程度(Partial vs Global)对任务成功率的影响。
✨ 解决方案
VirtualOffshore仿真框架
1. 三维环境建模
使用 Unity 3D游戏引擎 构建,包含三个基于真实设计参考的海上平台场景:
- 静态场景:结构层、甲板、管道、直升机停机坪等。
- 动态对象:可交互的阀门、按钮、指示灯、扳手等。
- 物理仿真:集成NavMesh导航网格,支持真实的物理碰撞和重力模拟。
2. 代理(Agents)模型
系统中集成了三种类型的具身智能体:
- 四足机器人 1 (Spot):波士顿动力风格的机器狗。
- 四足机器人 2 (Anymal):另一种工业级四足机器人。
- 人类工人的Avatar:用于模拟人机协作或人工操作。
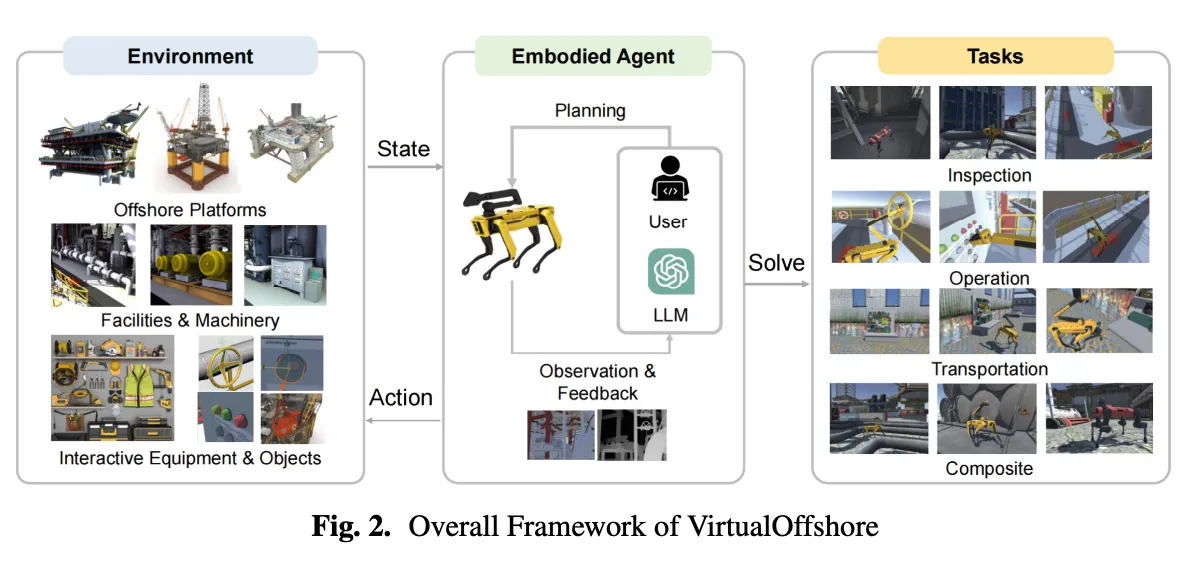
LLM驱动的智能体
核心能力
智能体具备感知、决策和行动三个环节:
- 感知:通过环境图(Environment Graph)或视觉传感器(RGB-D图像)获取信息。
- 决策:利用LLM将自然语言指令转化为动作序列。
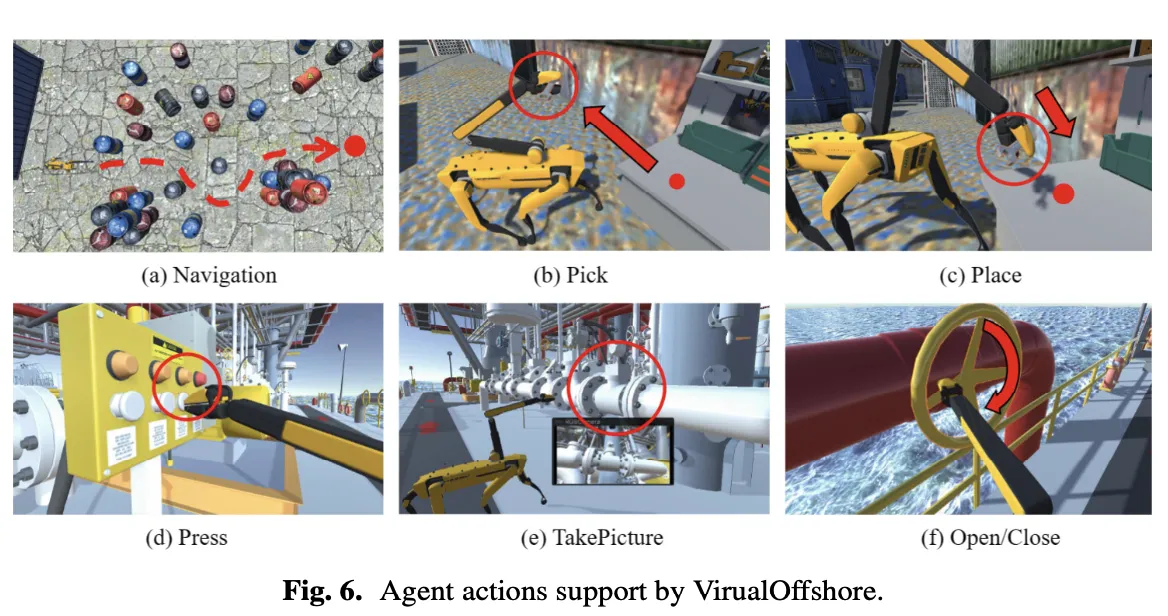
- 执行:执行原子动作,包括
Navigation(导航)、Pick(拾取)、Place(放置)、Press(按压)、TakePicture(拍照)、Open/Close(开关)。
任务定义
系统定义了四类核心任务来评估智能体:
- 巡检 (Inspection):导航至指定设备并拍照(TakePicture)以评估状态。
- 操作 (Operation):前往设备处,改变其状态(如操作阀门、开关)。
- 运输 (Transportation):找到工具或物体并将其移动到指定位置。
- 复合任务 (Composite):上述三种任务的随机组合,要求更长的规划序列和更强的推理能力。
🏗️ 技术架构
系统组成
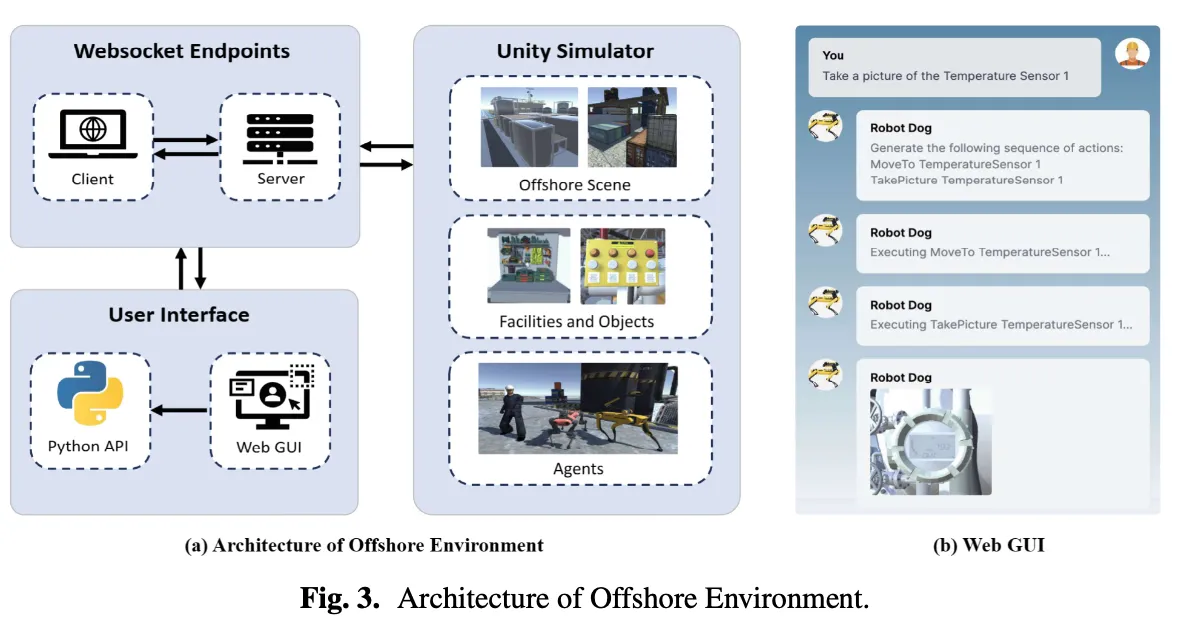
如图所示,架构分为三部分:
-
Unity Simulator (Server):
- 处理物理模拟、渲染及对象状态管理。
- 通过C#脚本暴露控制接口。
-
WebSocket Endpoints:
- 实现Server与Client之间的实时通信。
- 传输观测数据(JSON/Image)和动作指令。
-
User Interface (Client):
- Python API:用于算法开发和自动化测试。
- Web GUI:基于HTML/JS的可视化交互界面,支持人类发送自然语言指令。
🧪 实验与评估
实验设置
使用 GPT-3.5 Turbo 作为基础模型,设置了5种基线模型进行对比:
- Random:随机选择动作。
- Zero-shot:无环境感知的直接规划。
- Few-shot:提供少量演示示例。
- Partial:仅提供局部环境观测信息(模拟真实机器人视野限制)。
- Global:提供全局环境图信息。
实验结果 (基于论文Table 1)
我们使用 成功率 (SR) 和 执行率 (ER) 作为主要指标。
| 模型 (Baseline) | Inspection (SR) | Transport (SR) | Operate (SR) | Composite (SR) | 平均成功率 (Avg SR) |
|---|---|---|---|---|---|
| Random | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Zero-shot | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Few-shot | 0.75 | 0.50 | 0.50 | 0.38 | 0.53 |
| Partial | 0.25 | 0.25 | 0.00 | 0.00 | 0.13 |
| Global | 0.88 | 0.63 | 1.00 | 0.25 | 0.69 |
关键发现
- 环境信息至关重要:Random和Zero-shot模型几乎无法完成任务。
- Few-shot的泛化性:在缺乏全局信息时,Few-shot模型比Partial模型表现更好,说明LLM能从示例中学习通用的寻路模式。
- Global模型表现最佳:拥有全知视角(Global Graph)的模型在单项任务上表现优异,但在复杂的复合任务中,所有模型的成功率都显著下降,表明长序列规划仍是挑战。
⚙️ 结论与展望
结论
VirtualOffshore填补了海洋平台机器人仿真环境的空白,提供了一个包含物理仿真和高真实感渲染的测试平台。实验证明,结合环境信息的LLM智能体能够完成特定的工业任务,但也暴露了在处理长序列复合任务时的局限性。
未来计划
- 增强环境的物理交互保真度。
- 引入更多样化的任务类型。
- 加入人类Avatar与机器人的交互协作场景。
致谢:本研究得到国家自然科学基金 (No. U21A20488) 及之江实验室重点研发项目支持。